|
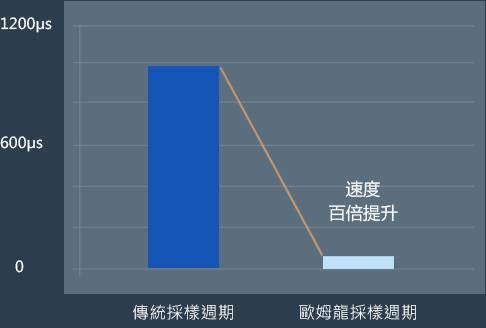
採樣
模擬量採樣週期僅僅 10μs,數據採集速度相比以往提高了 100 倍
|
|
|
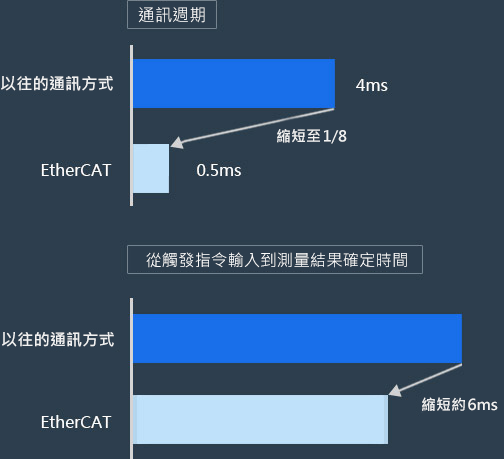
網路
高速開放的 EtherCAT 網路通信週期僅 500μs,可與運動控制同步,設備間數據傳輸的速度得到飛躍式的提升。
|
|
|
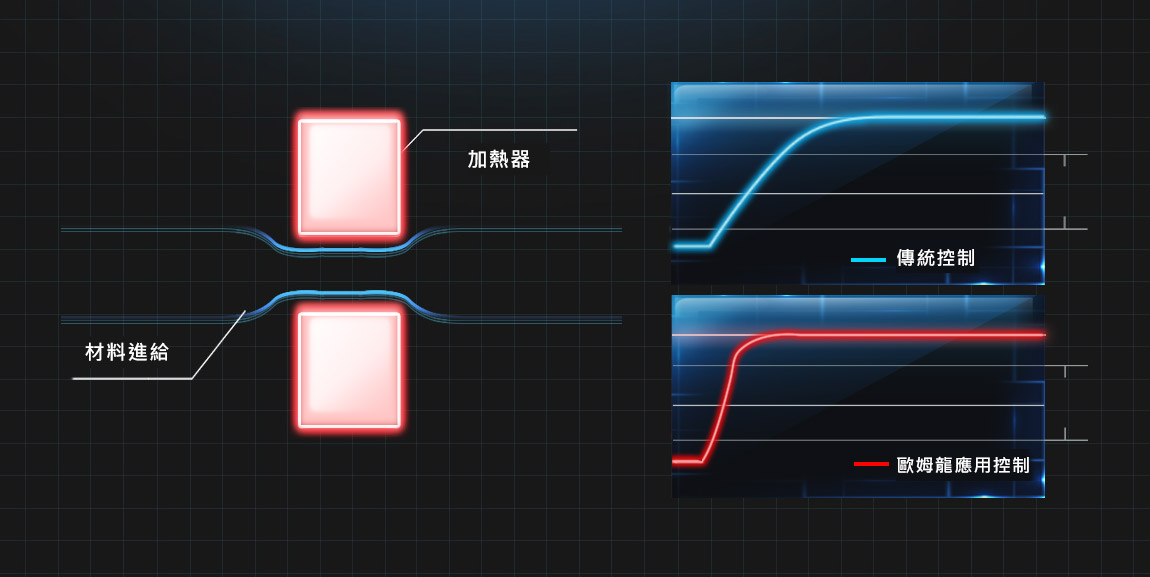
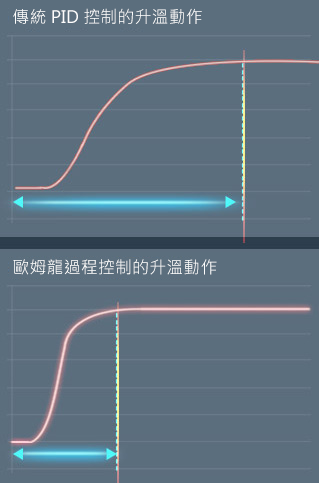
算法
融合了前饋控制,相比於二自由度的 PID 算法,升溫速度大幅提升
|
|
|
均一控制
对同一个对象使用多个加热器的情况下,可以抑制对象表面和空间的温差,实现温度均衡,提高产品质量。
温度均一控制
温度梯度控制
|
|
|
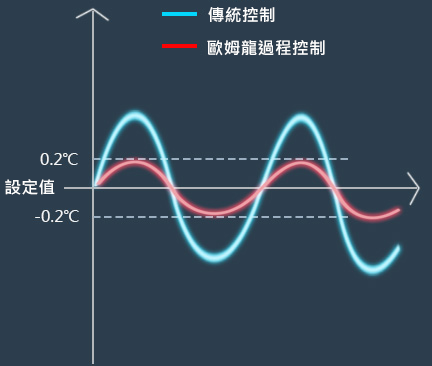
高精度控制
有效地減小由熱慣量引起的固有控制偏差,控制精度可達到 ±0.2°C
|
|
|
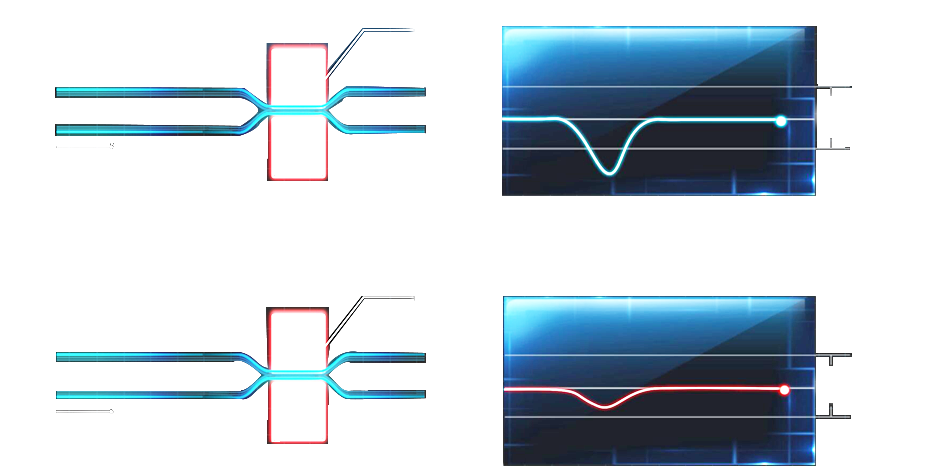
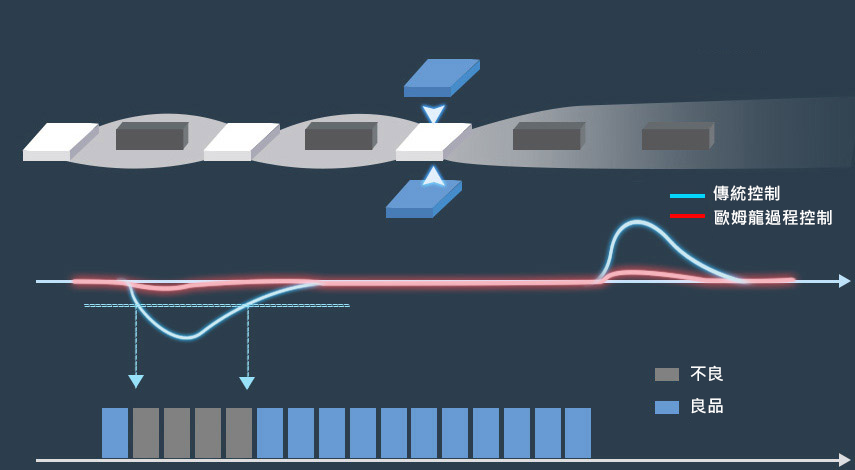
抑制定型干擾
有效抑制外部干擾引起的狀態波動,迅速的恢復到穩定工作狀態
|
|