






|
再高的分辨率亦能高速處理
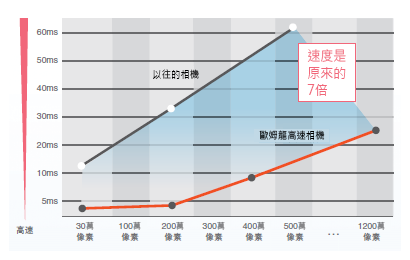
超高速影像輸入 最快 3.3ms
隨著對品質要求的提升,使相機的分辨率越來越高。
為配合設備的運行速度,必須對高分辨率影像進行高速處理,因此在影像輸入時間上大幅改善。 即使增加連接的相機台數、影像分辨率高,也能透過高速影像輸入大幅縮短單位生產時間。 
|
|
|
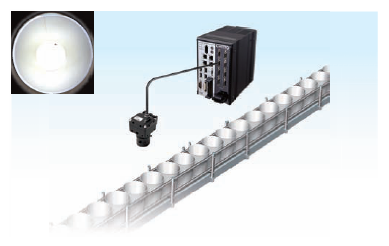
多相機檢測亦能高速處理
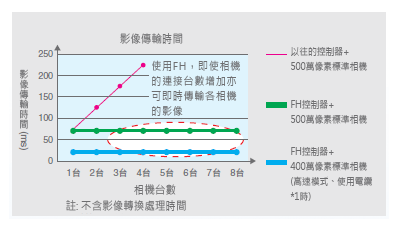
即時影像傳輸
使用高分辨率相機需要處理的數據量多,影像輸入時間及數據傳輸時間皆為課題。
使用視覺控制器憑藉影像傳輸的「高速化」和「多線程」, 可即時處理因高分辨率相機或多台相機生成的大容量影像。 如今,可利用歐姆龍視覺在不延長處理時間的前提下,實現以往因速度優先放棄的高精度測量。 
|
|
|
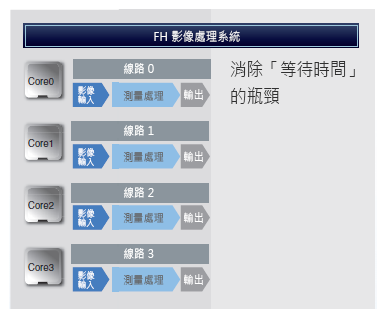
無需等待時間並列處理多條線路無需延長線路節拍,將 4 台控制器整合為 1 台。
可大幅降低多線路工序的成本。 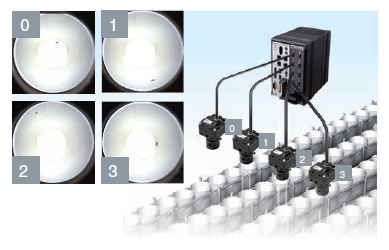
|
|
|
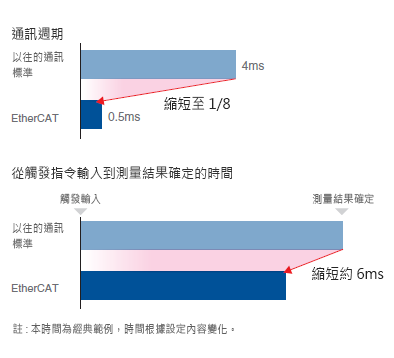
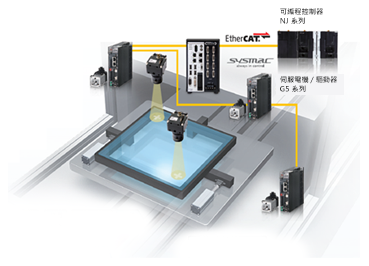
高速同步輸出的 EtherCAT 網絡
高速輸出測量結果,提升設備單位處理效率
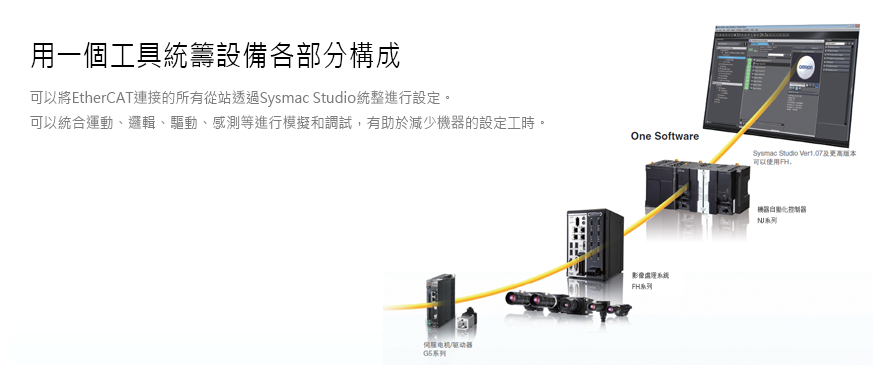
工控網絡
EtherCAT EtherCAT 是最適合工業控制的高速開放網絡。 利用 EtherCAT 連接可編程控制器NJ系列、控制運動的伺服馬達 / 驅動 G5 系列,能實現比一般的通訊規格從工件的位置測量到啟動軸為止更高速控制。 特點 實現最短通訊週期 500μs 與通訊週期同步的運動控制 
|
|
|
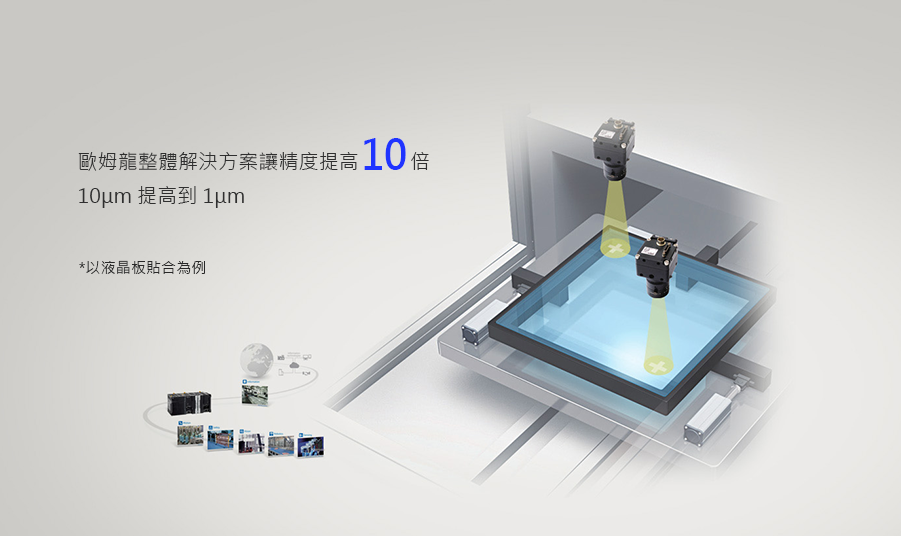
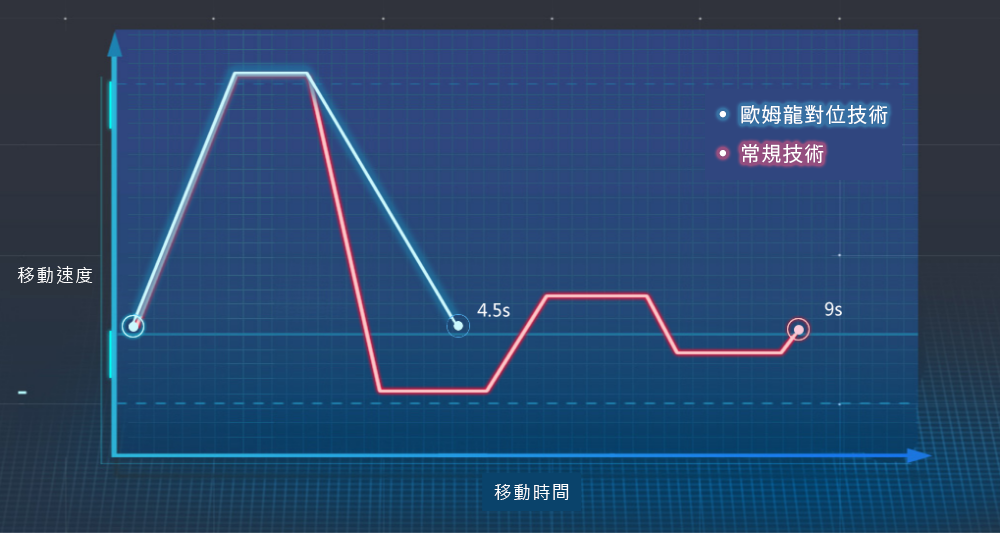
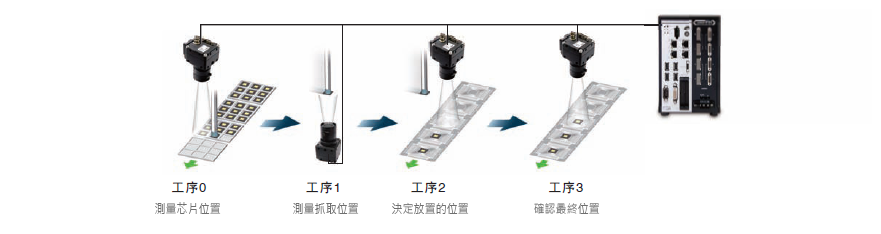
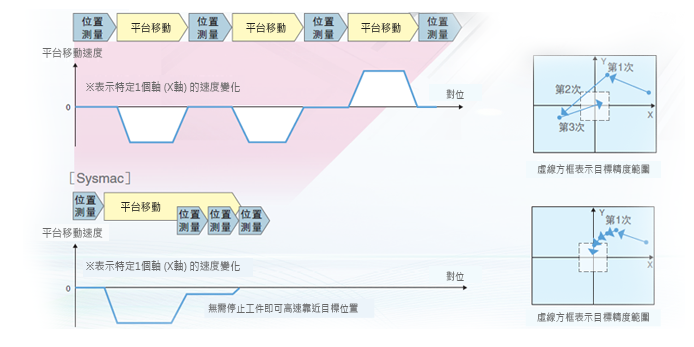
連續對位
無需停止工件的對位方案
在有 μm 單位層級精度要求的機器中,僅靠一次對位可能無法減小誤差。此時,需實施多次對位,造成大幅增加時間成本。
歐姆龍建議採用排除工件停止時間 (處理時間增加的主因) 的控制方法。 利用可實現高速、高精度控制的自動化平台 Sysmac,連續檢測工件位置,逐次更新距離目標位置的移動距離,無需停止工件即可高速接近目標位置。 |
|
|
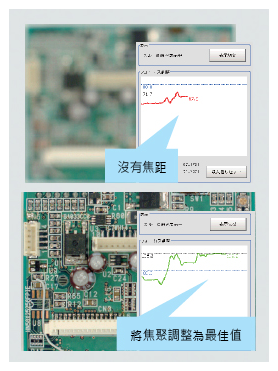
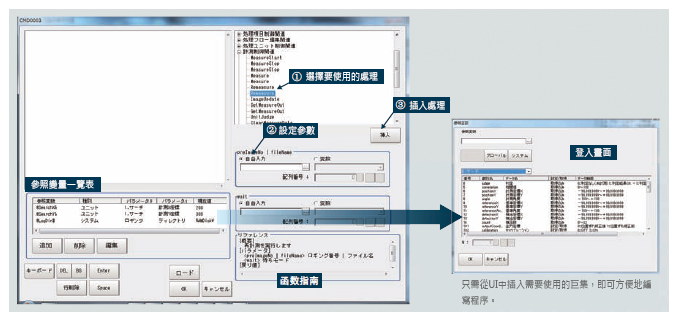
輕鬆設定最佳焦距、光圈
|
|
|
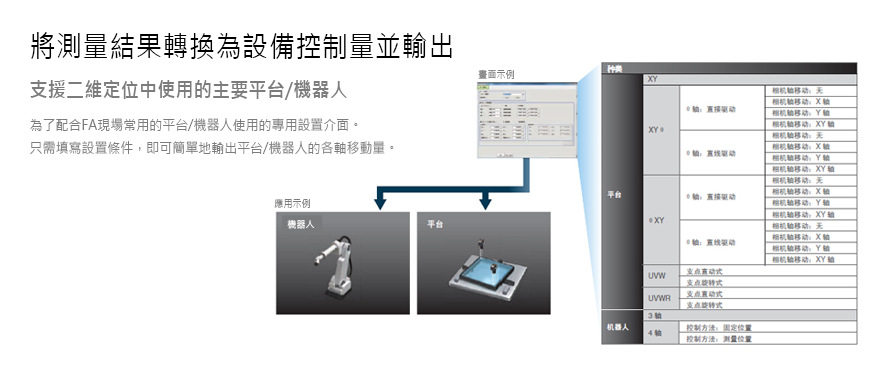
可支持的對位方式
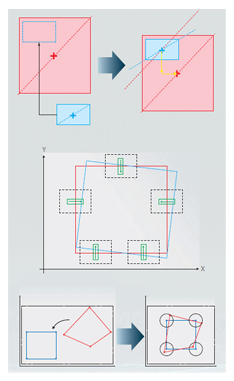
位置角度對位
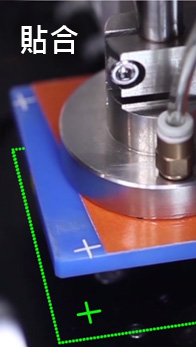
使用補償功能進行大小不同的兩個工件的對位。 位置角度對位支援補償功能,可透過位置補償進行靈活對位。 邊測量對位 透過測量工件邊線來對位的方式。 「無對位標記」、「無法測量工件角度」 時也可應對。 這個方法最適合圓形工件的定位。 對應點對位 根據對應的位置訊息,計算從測量位置到基準位置的各軸移動量。 此方式最適合類似電子基板的貼合等,如偏離一定距離將導致通電不良,必須將所有點的距離控制在一定範圍內的運用。 |
|
|
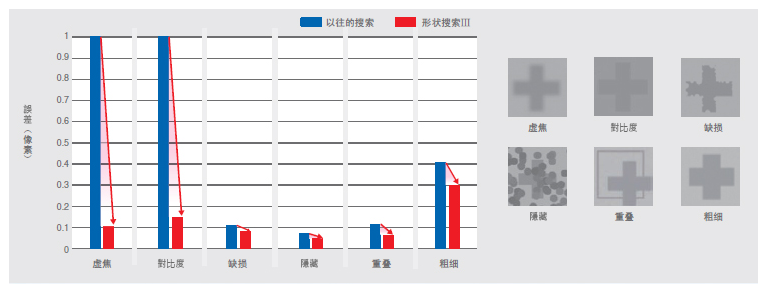
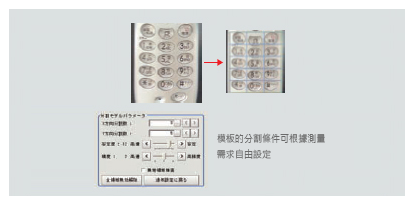
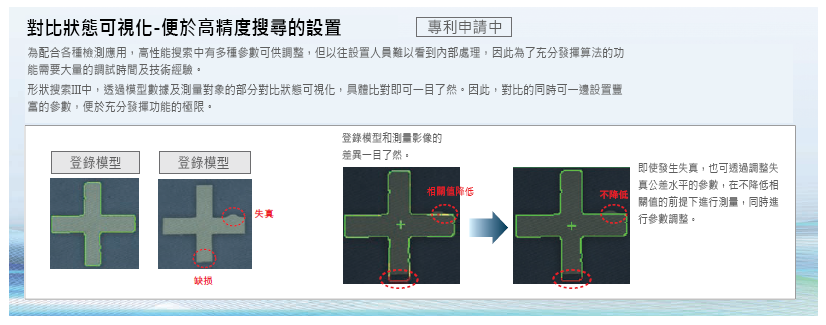
靈敏搜索
將登錄的模板影像自動分割,透過詳細比對,用很大的數值來量化一般的搜索無法區分的細微差異。
因此不必再為設置初始值擔憂。 |
|
|
靈活搜索
在靈活搜索處理中,透過將多個合格品登錄模板,無論印刷品質或形狀變化都可準確搜索。
將明顯的差異作為不良品檢測出,降低了浪費。 |

|
|
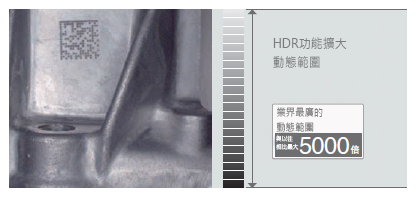
只需簡單的操作即可進行影像合成的極大動態範圍功能
單純的影像合成中需先設定拍攝條件,然後創建要獲取的影像。
利用歐姆龍的極大動態範圍功能,只需依照影像的亮度分佈圖表,設定要拍攝的亮度上限和下限,即可進行調整。 |
|

|
可在一台顯示器統一對多台FH進行情況確認及設置調試。
可高效進行設備投產前的相機影像調試及結果執行。
應用案例 1:僅需在一處對多個 FH 進行操作
應用案例 2:在一台顯示器上顯示多台 FH
註 : 顯示器用遠程操作工具的獲取,請向本公司銷售人員諮詢。
|

|